
LIN規格
- LIN 1.3
- LIN 2.0
- LIN 2.1
- J2602*
- マスター/スレーブ
- マスター
- スレーブ
- マルチマスター
- マルチスレーブ*
診断法
- クラス1
- クラス2
- クラス3
- フラッシュブートローダ(FBL)
- アプリケーション統合のサポート








Visulin
 ihrのLINテスト用エミュレータおよびハードウエアおよびテスト対象に対して、ソフトウエアの構成と分析可能なすべての機能が統合された環境下で結合されます。一つ以上のエミュレータとの通信が高速CANの測定バスを介して行われます。
ihrのLINテスト用エミュレータおよびハードウエアおよびテスト対象に対して、ソフトウエアの構成と分析可能なすべての機能が統合された環境下で結合されます。一つ以上のエミュレータとの通信が高速CANの測定バスを介して行われます。
Visulin設定
LINエミュレータは当初、当面のタスクのために準備する必要があります。LINおよびCANバス記述ファイルのための環境の説明を選択した後に、補助的な設定がなされており、周囲に資源assigned.Theエミュレータの動作は、イベントベースのコマンドのリンクを作成することで設定されています。設定が完了すると、Visulinエミュレータメモリに完全なコンフィギュレーションテーブルを転送する。そこには、どちらのフラッシュROM内に永続的に格納、またはテスト目的のために、揮発性RAMに保持することができる。この後エミュレータは、その設定されたアプリケーションと完全に自律的に動作することができます。全ての設定調整が管理され、プロジェクトファイルに保存されます。
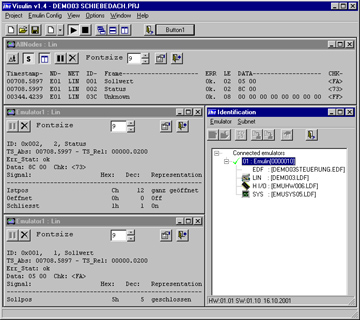
リアルタイム監視
エミュレータが動作中のPCと接続されたままならば、Visulin全体LINとCANデータトラフィックを読み込み、表示することができます。データは複数のメッセージに表示されている取得したタイムスタンプと一緒に一覧表示されます。LIN記述ファイル内で定義されている信号の内容が正しい論理的および物理的な表現でデコードされ、一覧表示されます。信号は、制御パラメータとハードウェア資源が書き込まれ、対話的に読み出すことができる。
データストレージと処理
Visulinは、LINから作成されたファイルの両方がCAN測定バスからだけでなく、リアルタイムデータをログ処理します。データストリームを濾過した後、ログファイルに書き換えることができる。
LIN規格
診断法
Microchip LINドライバ
LINドライバ設定ツール1[PIC®マイクロコントローラ用とMPLAB®IDE]
MicrochipのデモLDCツール
簡単な説明:
 特別なLINの専門知識がないと、設計者は簡単にPIC®マイクロコントローラ(マイコン)を使用して、アプリケーションにLINインタフェースを追加することができます。LIN設定ツールは、LIN仕様1.3、2.0および2.1をサポートしています。、18及び24 MCUファミリ - 組み込みの世界で発表されたアプリケーションの例では、ツールは、PIC 16のためのLIN 2.0スレーブ·アプリケーションを構成するために導入されました。
特別なLINの専門知識がないと、設計者は簡単にPIC®マイクロコントローラ(マイコン)を使用して、アプリケーションにLINインタフェースを追加することができます。LIN設定ツールは、LIN仕様1.3、2.0および2.1をサポートしています。、18及び24 MCUファミリ - 組み込みの世界で発表されたアプリケーションの例では、ツールは、PIC 16のためのLIN 2.0スレーブ·アプリケーションを構成するために導入されました。
さらに、設計者は、LINの仕様に従ってオプションサービスを選択することができます。経験豊富なユーザーは、ハードウェア固有の設定を変更することができます。ツールは、組み込みプロジェクトのためのCコードを生成します。構成は、後の使用のために保存することができる。生成されたドライバファイルは、MPLAB®IDEプロジェクトに統合され、コードが指定された準拠したLIN APIをサポートして生成されます。
そのため、プロジェクトマネージャはアプリケーションに集中およびLINドライバを準拠に依存することができます。
特徴:
注:マイクロチップ社の名称とロゴ、MPLAB、PICとは、米国およびその他の国におけるマイクロチップテクノロジー社の登録商標です。記載されているその他すべての商標は、それぞれの会社に帰属します
LINコンフォーマンステスト
LINコンフォーマンステストとは何ですか?
LINコンフォーマンス·テストは、コンポーネント、デバイス、実装、またはECUが指定された基準に一致されているかどうかを決定するために使用される試験手順です。適合性テストを実行することにより、適合性試験仕様の要件を参照して精査します。
適合性試験の目的は、同時に技術的および経済的な側面を考慮することにより、異なるシステムの実装の 信頼性のある相互運用性の実現可能性を高めることです。
なぜLINコンフォーマンステスト?
車載通信プロトコル規格であるLINのデバイス実装をテストしている研究所は、世界中に顕在しています。お互いの相互互換という点で、適合性試験仕様で定義されている標準化された適合性試験が必要でです。これは、お互いに匹敵する再現性追跡可能な結果を保証します。特に。
LINコンフォーマンステストタイプ
テスト仕様は、LINバスとLIN通信の3つのフィールドが定義されています。
物理層に関するコンフォーマンステスト仕様書は、主に次のテスト(バリエーションが可能なバージョンによって異なります)とLIN仕様が近接しています。
運用条件-校正
3.2.1データリンク層
また、データリンク層のテストでは、LIN仕様に近く、以下の試験を(バリエーションが可能なバージョンによって異なります)を扱っている。
スレーブタスクによるマスターとしてIUT - 失敗なくコミュニケーション - LIN識別子の変化- IUTマスターとしてスレーブとしてIUT - - IUTスレーブタスクによるマスターとして-チェックサムの送信バイト-スレーブとしてIUT -スレーブタスクによるマスターとしてIUT -拡張フレーム、予約、奴隷としてIUT -コマンドフレーム「マスタ要求」、マスターとしてIUT -コマンドフレーム「マスタ要求」、奴隷としてIUT -コマンドフレーム「スレーブ応答フレームマスターとしてIUT -コマンドフレーム「スレーブ応答フレーム」、奴隷としてIUT - IUT仕様に応じてサポートされているフレーム「スレーブとしてIUT 不全コミュニケーション -ビットエラーがスレーブとしてIUT -チェックサムエラー、スレーブとしてのIUT イベント·フレームを引き起こした -イベントトリガフレーム、IUT奴隷として
3.2.2 NCNM
次のテストは、ノードの構成/ネットワーク管理テストの一部である。
状態管理
3.3 EMC
以下のEMC試験は、コンフォーマンステスト仕様書にdescibedている。
テストセットアップ
LINバスに基づいた二つの追加の車載用バスシステムが確立しています。一方ではバスを冷却してから、再度、SAE-J2602と呼ばれるバス規格へ接続します。
バスクーリング
冷却バスは、自動車用エアコンに採用した独自のバスです。バスは、LIN 1.3に基づいており、以下のLIN-異なる機能を示している。
アドレス指向の通信システム
SAE-J2602
SAE J2602標準を参照するバスシステムは、米国のアメリカのOEMが使用して一般的。このバスは、LIN 2.0に基づいており、次の基本的な違いを示している。
スレーブ·ステータスと通信エラーの指示を
物理層に違いはありません。
上記のバスシステムについての詳しい情報が欲しい人のために、呼ば仕様を以下に示します。応じて組織が部分的に有料で書類(IHR社はどんな書類を割り当てませんのでご了承ください)をご提供することがあります。
* LIN OSIレイヤ1 - LIN物理レイヤ仕様、リビジョン2.0のための物理層
* LIN OSIレイヤ2 - LINプロトコル仕様、リビジョン2.0のためのデータリンク層
9月 18、2003、バージョン1.0、2004年8月1日
* LIN仕様パッケージのためのノード構成/ネットワーク管理
リビジョン2.0、2003年9月18日バージョン1.0、2004年8月1日
SAE-J2602-1 2004-08年発行、車両用途のために2005-09年、LINネットワークを改訂し、LINネットワークは、車両用途の適合性試験のために2005-09年発行、SAE-J2602-2、 -
SuperCAN
 SuperCANは、CANバスのための強力な監視システムです。それは、1独立したCANチャンネルがあり、リッスン専用モードをサポートしています。「メッセージ送信ウィンドウ」の助けを借りて、ユーザーがCANフレームを送信するために、様々なロジックを作成することができます。たとえば、複数のフレームを、文書をCANに送信、Cスクリプトを使用して、CANフレームを送信するなど「ハードウェア設定ウィンドウ」を使用すると、ユーザは容易に、CANチャネルのボーレート、サンプル·ポイントとフレームフィルタを設定することができます。それは自由に、CANバス、フィルター枠に関するリアルタイムのフレームを記録できるようにSuperCANも、強化されたフレーム記録モジュールを提供する。記録データは、ASC、XLSおよびCSV形式で保存することができます。
SuperCANは、CANバスのための強力な監視システムです。それは、1独立したCANチャンネルがあり、リッスン専用モードをサポートしています。「メッセージ送信ウィンドウ」の助けを借りて、ユーザーがCANフレームを送信するために、様々なロジックを作成することができます。たとえば、複数のフレームを、文書をCANに送信、Cスクリプトを使用して、CANフレームを送信するなど「ハードウェア設定ウィンドウ」を使用すると、ユーザは容易に、CANチャネルのボーレート、サンプル·ポイントとフレームフィルタを設定することができます。それは自由に、CANバス、フィルター枠に関するリアルタイムのフレームを記録できるようにSuperCANも、強化されたフレーム記録モジュールを提供する。記録データは、ASC、XLSおよびCSV形式で保存することができます。
デバイス

![]()